先进
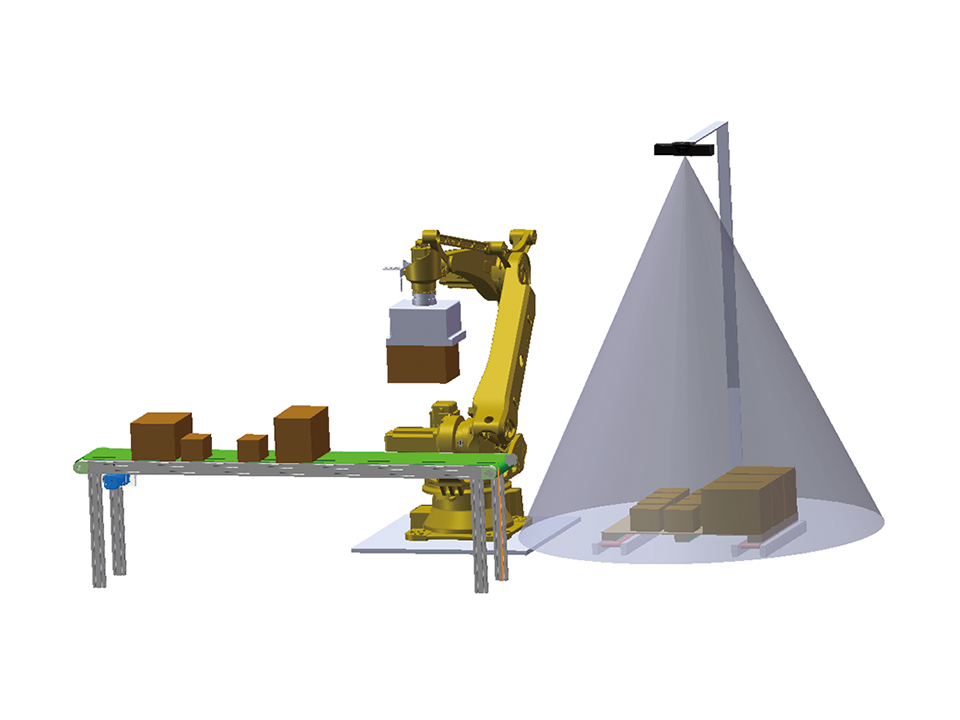
内置碰撞检测、轨迹规划等先进算法,可有效规避碰撞,根据实际情况单次抓取或数个抓取

稳定
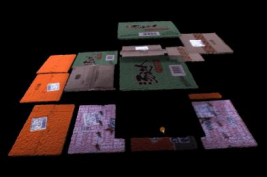
基于机构光的特性,能够在绝对黑暗环境和或者环境光的场景下稳定工作

高效
处理周期最快可达1S,包括采图、处理和输出流程

定制
掌握核心自主可控算法,可根据客户需求定制开发

便捷
真正的可视化编程界面,用户无需编写代码,简单培训即可操作

智能
可应对纸箱表面面单、轧带、胶带、图案、反光膜等复杂情况;可应对麻袋变形、褶皱、表面图案、文字等复杂情况